
お知らせ
二足歩行ロボットをつくろう
11月22日(土)に、「二足歩行ロボットをつくろう」を開催しました。
講師は、デンソー養技会西尾1分会、善明分会、(株)デンソー技研センター、(株)デンソーの皆さんです。
※デンソー養技会
デンソー工業技術短期大学校の工業高校課程、高等専門課程を修了した社員で構成された組織。デンソーモノづくりスクールなどを運営して、モノづくりの楽しさや奥深さを子どもたちに体験してもらう機会づくりを行っています。
今回は、人間と同じように2本の足で歩く、二足歩行ロボットの製作に挑戦します。
二足歩行型のロボットといえば、当館にも「トヨタ・パートナーロボット」がいますね!腕と指を巧みに動かして、毎日バイオリン演奏を行っています。「人との共生」を目指して開発が進むパートナーロボットは、今後さまざまなシーンでの活躍が期待されています。
まずは講師から、二足歩行ロボットの仕組みについて説明を受けました。
人間は歩くために片足を上げても、身体の他の場所でバランスをとっているため倒れません。ロボットは、ただ片足を上げるだけでは倒れてしまします。今回作るロボットは、電池で動くモーターの回転をクランク機構によって足の動きに変え、左右に重心を移動させることで倒れずに前進することができます。


それでは制作開始!
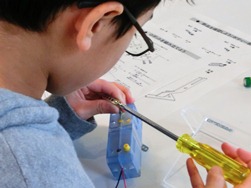
まずはじめに、すべての部品の確認とモーターの動作確認を行います。


次に、ギヤボックスを組み立てます。
ギヤは3種類。使用するギアの部品を間違えないように気をつけます。

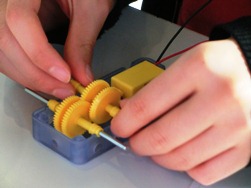
ギアボックスのシャフト左右にクランクを取り付け、続いてクランクにロボットの足を取り付けます。
クランクや足の向きを間違えないよう、説明書を見ながら慎重に・・・。

足の上部にある溝にネジを上から入れ、ギアボックスに取り付けたら足の取り付けは完成!
さっそく足がスムーズに動くか確認します。モーターのスイッチを入れると、足が上下に動きバランスをとりながらロボットが前に進んでいきます。クランク機構によって、回転運動が直線的な往復運動に変わり、ロボットが歩行する仕組みを、自分の目で確かめることができました。




ギアボックスに胴体を取り付けたら、あとはロボットの飾り付けです。
たくさんの材料の中から好きな飾りを選び、どこに付けたいか講師に伝えて、ホットボンドでくっつけてもらいます。納得できるまで飾り付けできたら、ついに完成です♪




最後に、ロボット同士で綱引きの勝ち抜き戦をしたり、全員で一斉に歩かせて徒競走をしたりしました。
飾りの付け方が違うこともあり、バランスの良し悪しはロボットによって千差万別。どちらのゲームも白熱の戦いとなりました。優勝した子は講師から金メダルをもらい、笑顔でピース!
これからも様々なロボット作りに挑戦してみてくださいね♪



